
Source: www.Sciencedaily.Com
In the United States, lung cancer is the leading cause of cancer-related deaths. Some tumors are extremely small and hide deep within the lung tissues making it nearly impossible or extremely difficult for surgeons to reach them. To handle this challenge effectively, researchers at the Department of Medicine, University of North Carolina have been working on an extremely bendy but sturdy robot which is capable of moving through the lung tissue without damaging it. Their research has reached a new milestone where the team has proven that their robot can autonomously go from Point A to Point B while avoiding important structures like blood vessels and tiny airways in a living laboratory model. This steerable needle is highly compact but the system is packed with a suite of technologies that allow the needle to navigate in real-time.
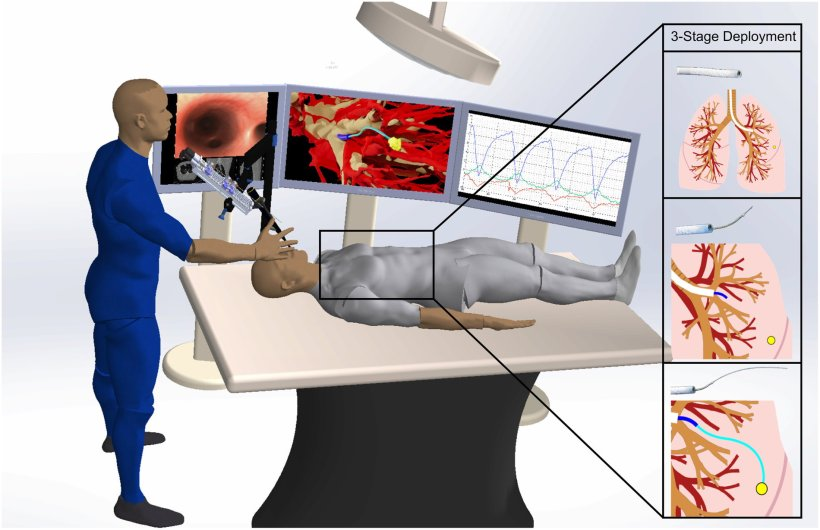
The needle can also account for respiratory motion. The researchers tested their robot while the laboratory model performed intermittent breath holding. Every time the subject’s breath is held, the robot is programmed to move forward. This technology gives you that extra few millimeters or centimeters which would help with pursuing small targets in the lungs. Thus, allowing us to reach targets we cannot otherwise reach with a standard or even robotic bronchoscope.
The robot is made of many separate components. A mechanical control provides controlled thrust of the needle to go forward and backward and the needle design allows for steering along curved paths. The needle is made from nickel-titanium alloy and is etched with laser to increase its flexibility and effortless movement through the tissue. Other attachments like catheters could be used together with the needle to perform procedures like lung biopsies.
CT scans of the patients’ thoracic cavity were used and Artificial Intelligence (AI) engaged to create three-dimensional models of the lung including the blood vessels, airways and the chosen target. Using this 3-Dmodel and after positioning the needle for launch, their AI-driven software instructs it to automatically travel from point A to point B while avoiding vital structures.
This robot is a clear amalgamation of medicine, computer science and engineering which promises to improve medical outcomes for patients facing a variety of health challenges while providing guarantees on patient safety. This research study is published in Science Robotics.